 O(n) 原地归并的不稳定版本
O(n) 原地归并的不稳定版本

讲一个很有意思的学术算法,一个线性时间原地归并算法。
这一期是不稳定版本,下一期我们会讲稳定版本。以稳定版本为基础,归并排序可以同时满足稳定、原地、 时间,可以说非常神奇了。
算法主要参考这两篇论文,细节上会有修改:
- Practical in-place merging (opens new window) 这是不稳定版本。
- Fast Stable Merging and Sorting in Constant Extra Space (opens new window) 这是稳定版本。
WikiSort (opens new window) 也值得一看,是稳定版本。
另外 Sorting stably, in-place, with O(n log n) comparisons and O(n) moves (opens new window) 这个排序比本文的结论更强,多了 次移动的限制,可能是理论上最完美的排序。但是过于复杂看不懂喵。
# 1. 原地归并是什么
原地合并两个有序数组,输入是一个长度为 n 的数组 arr 和一个位置 pos,arr[0] ... arr[pos - 1] 属于第一个有序数组 A,arr[pos] ... arr[n - 1] 属于有序数组 B,merge 的结果是合并两个有序数组为 arr[0] ... arr[n]。
“原地”其实有两种含义,一是算法的结果直接写回原数组,比如 C++ std::inplace_merge 就是这个含义;二是 的额外空间复杂度,有时会允许 的递归栈,这篇文章的“原地”都是这个含义。
# 2. 一些前置算法
双指针归并和区间旋转在我之前文章有讲,我就直接复制过来。
# 2.1. 双指针归并算法
两个指针指向两个数组的开始位置,不断把较小元素放到 buffer 数组,对应指针向后移动。最后把 buffer 里的元素移动回原数组。
这个过程如下图所示:
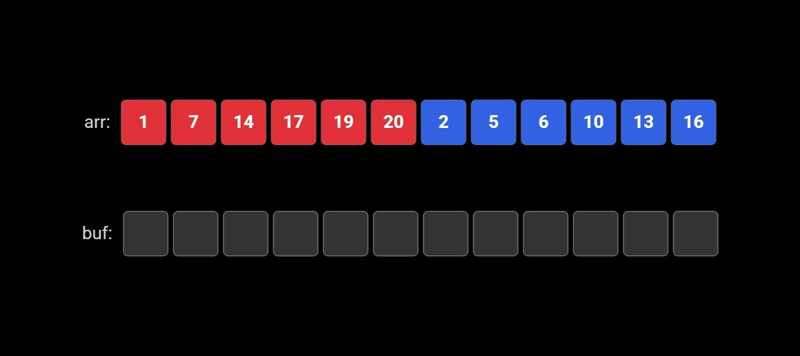
这个算法在 C++ std::inplace_merge (opens new window) 里亦有记载(如果空间够的话)。
# 2.2. 缓冲区双指针归并算法
传统的双指针归并不是原地算法,需要进行改造。假设一个数组,按顺序是长度 right_len(或大于 right_len)的缓冲区,长度 left_len 的数组 A,长度 right_len 的数组 B,使用双指针归并将 A 和 B 归并在数组开头。
缓冲区的元素不能丢弃,因此使用交换来移动元素。
template <typename T>
void merge_with_swap(T* output, T* first, T* mid, T* last) {
T* left_ptr = first;
T* right_ptr = mid;
while (left_ptr < mid || right_ptr < last) {
if (right_ptr == last || (left_ptr < mid && *left_ptr <= *right_ptr)) {
std::swap(*output, *left_ptr);
output++;
left_ptr++;
} else {
std::swap(*output, *right_ptr);
output++;
right_ptr++;
}
}
}
这里 output 一开始指向缓冲区首元素。output 不会追上 left_ptr,因为如果 left_ptr 指针右移,output 指针和 left_ptr 的距离不变;而 right_ptr 指针右移的次数只有 right_len 次(数组 B 的长度),刚好是缓冲区大小。
# 2.3. rotate 区间旋转算法
原地算法基本绕不开 rotate(区间旋转),把两个相邻区间 [A B] 原地变成 [B A],保持区间内部顺序不变。这个方法不唯一,最经典的做法是三次翻转法(或手摇算法):先分别翻转区间 A 和区间 B,再整体翻转整个区间 [A B],就能得到 [B A]。
这个过程如下图所示:
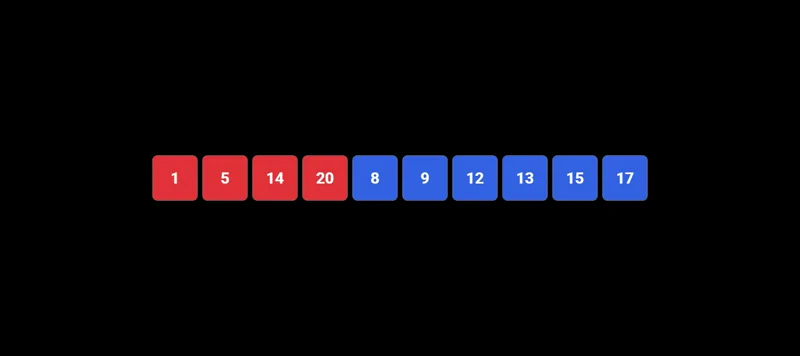
这个算法在 C++ std::rotate (opens new window) 里亦有记载。当然标准库会根据数据量采用不同算法,这里就不深究了。
# 2.4. 旋转归并算法
旋转归并算法也是合并两个有序数组,基于 rotate,因此不需要额外空间。
一开始是两个有序数组 [A B],不断进行下面步骤:
- 取 A 的第一个数
A[0]。 - 将 B 划分为小于
A[0]的区间 B1、大于等于A[0]区间 B2。 - 通过 rotate 算法将 A 和 B1 交换。
A[0]已经确定位置,剩下 A 的元素作为新的 A,B2 作为新的 B,回到步骤 1。
这个过程其实是用“批量”插入排序的方式完成 merge。
设 是 A 的长度, 是 B 的长度。因为算法会循环 次,所以 A 的每个数旋转 次,B 的每个数旋转 次,总时间复杂度 。
同理只要反一下就能做到 复杂度,在代码里我会根据数组长度来选择两种算法。
template <typename T>
void inplace_merge_with_rotation(T* first, T* mid, T* last) {
if (mid - first < last - mid) { // 左数组向右滚动 O(l^2 + r)
while (first < mid && mid < last) {
T* split_right = mid;
while (split_right < last && *split_right < *first) {
split_right++;
}
std::rotate(first, mid, split_right);
first += (split_right - mid) + 1;
mid = split_right;
}
} else { // 右数组向左滚动 O(l + r^2)
while (first < mid && mid < last) {
T* split_left = mid;
while (split_left > first && *(split_left - 1) > *(last - 1)) {
split_left--;
}
std::rotate(split_left, mid, last);
last -= (mid - split_left) + 1;
mid = split_left;
}
}
}
# 3. 不稳定原地归并 in O(n) time
这是一个分块算法,我们定义块大小 。
# 3.1. 分块和对齐
把 A, B 数组划分为大小 s 的块,不整除的部分(非对齐部分)用 rotate 算法移动到 B 数组的后面。不整除的部分在最后一步会处理。
template <typename T>
void unstable_inplace_merge(T* first, T* mid, T* last) {
size_t left_len = mid - first;
size_t right_len = last - mid;
size_t block_size = std::floor(std::sqrt(left_len + right_len));
size_t left_aligned_len = left_len / block_size * block_size;
size_t right_aligned_len = right_len / block_size * block_size;
size_t aligned_len = left_aligned_len + right_aligned_len;
std::rotate(first + left_aligned_len, mid, mid + right_aligned_len);
/* 后续算法 */
}
# 3.2. 块间排序
所有块按首元素升序排序,首元素相同比较末尾元素,块内的顺序不变。
为什么要这么排序,首元素有序是为了块间合并步骤的一些前提,这个在块间合并步骤会讲。而比较末尾元素,是处理块内都是相同值的情况。例如一块是 [1, 1, 1, 1],另一块 [1, 1, 2, 2],比较末尾元素可以避免第二块放在第一块前面。
由于交换两个块的代价很大,我们需要每个块只要交换 次的排序,用什么排序呢?没错,就是选择排序。
比较次数 ,交换次数 ,因此总复杂度 。
template <typename T>
void block_selection_sort(T* first, T* last, size_t block_size) {
for (T* cur = first; cur < last; cur += block_size) {
T* min = cur;
for (T* scan = cur + block_size; scan < last; scan += block_size) {
if (std::pair{*min, *(min + block_size - 1)} > std::pair{*scan, *(scan + block_size - 1)}) {
min = scan;
}
}
if (min != cur) {
std::swap_ranges(cur, cur + block_size, min);
}
}
}
# 3.3. 块间合并
这是最核心的一个步骤。
我们需要大小为 s 的缓冲区来完成这一步骤,考虑把第一块的数划为缓冲区。
- 利用第 i 块为缓冲区对第
i + 1块、第i + 2块进行双指针归并。注意不能丢失缓冲区的数,所以要用缓冲区双指针归并算法。这一步后缓冲区的数会转移到第i + 2块的位置。 - 交换第
i + 1块和第i + 2块,如果是i + 2是最后一块就不用。 - i 增加 1,回到步骤 1。
块间合并完后除了缓冲区,所有块都整体有序。
为什么算法可行呢?因为,我们每次归并的是首元素最小的两个块(不考虑缓冲区)。
如果首元素最小的两块一开始属于同一数组,假设是数组 A。显然数组 B 的最小值大于等于第二块首元素,也就大于等于前一块的所有数。因此第一块就是最小的 s 个数。
如果首元素最小的两块一开始属于不同的数组(一块属于 A,一块属于 B),这两块已经包含了数组 A 和数组 B 的最小的 s 个数,因此最小的 s 个数只会出现在这两块里。
单次双指针归并 次交换,一共 次归并,所以总复杂度 。
template <typename T>
void block_merge_pairwise(T* first, T* last, size_t block_size) {
size_t n_blocks = (last - first) / block_size;
for (size_t i = 0; i + 2 < n_blocks; i++) {
merge_with_swap(first + i * block_size, first + (i + 1) * block_size,
first + (i + 2) * block_size,
first + (i + 3) * block_size);
if (i + 3 < n_blocks) {
std::swap_ranges(first + (i + 1) * block_size,
first + (i + 2) * block_size,
first + (i + 2) * block_size);
}
}
}
# 3.4. 处理尾部元素
我们把缓冲区移动到后面,和非对齐部分一起统称尾部元素。非对齐部分长度不大于 2s,缓冲区长度 s,因此尾部元素长度不超过 3s。
首先对尾部元素进行排序,用任意一个平方复杂度的排序即可,例如冒泡。这里的复杂度是 。
用旋转归并算法把前面部分(长度不超过 n)和尾部元素(长度不超过 3s)合并为一个有序数组。这里的复杂度是 。
template <typename T>
void bubble_sort(T* first, T* last) {
size_t len = last - first;
for (size_t i = 0; i + 1 < len; i++) {
for (T* j = first; j < last - i - 1; j++) {
if (*j > *(j + 1)) {
std::swap(*j, *(j + 1));
}
}
}
}
template <typename T>
void unstable_inplace_merge(T* first, T* mid, T* last) {
/* 前面几个步骤 */
bubble_sort(first + aligned_len - block_size, last);
inplace_merge_with_rotation(first, first + aligned_len - block_size, last);
}
# 4. 补个代码
完整实现 (opens new window)和测试 (opens new window)。
# 5. 稳定原地归并预告
不妨分析一下上面算法里什么操作破坏了稳定性。第一,“块间排序”里的选择排序是不稳定排序。第二,“块间合并”会把缓冲区打乱,同样导致不稳定。
我们会利用缓冲区作为 label 把算法稳定下来,思路类似带 index 的快速排序。细节有很多,就放到下一期讲了。